


 by Dr.Guero
by Dr.Guero
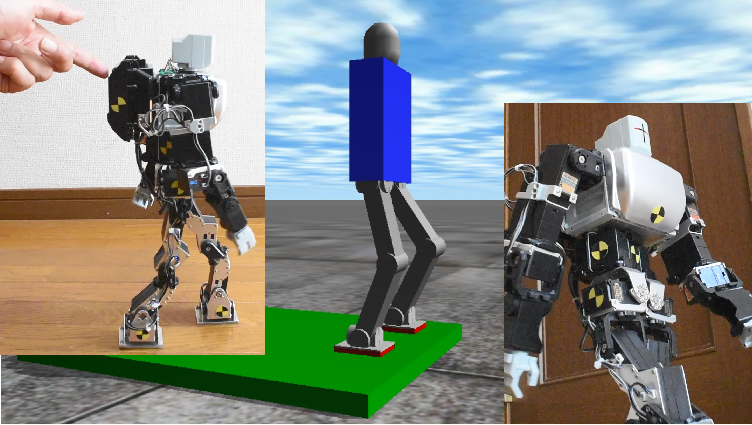
Biped robot that does not fall.

UVCの物理シミュレーションに続き今回はそれを実機に適用してみました。 動画では、UVCを適用したロボットに外力を加えた際の動きや UVCの原理およびロボットのハード構成などについて概説。 尚、現状版ではロボットの調整が難しいかもしれませんが 本ロボットのソースコードも公開します。
簡単な原理で歩く(Walk on a simple principle)
簡単な原理(UVC:Upper body Vertical Control)で歩く二足歩行ロボット。 ODE(Open Dynamics Engine)による物理シミュレーションを用い ロボットに外力が加わった際の安定性などについて検証してみました。 一般的に歩行制御には複雑な力学計算が必要ですが 本ロボットの場合、力学計算は一切行わず人間と同じ姿勢反射のみを利用し 僅か100ステップ程のプログラムで実現しています。 動画では外力に対応し後退したり踏ん張ったりするシーンがありますがこれは予め プログラムされたものではなくUVCによって不規則・自発的に生じる動作です。 (ソースコード公開) ▼ 詳しくはこちら
[Physical simulation] A bipedal walking robot that walks on a simple principle(UVC: Upper body Vertical Control). Using physics simulation by ODE (Open Dynamics Engine), I tried to verify the stability when an external force is applied to the robot. Generally,walking control requires complicated mechanical calculations, but in the case of this robot, it is realized by a program of only about 100 steps using only the same postural reflex as humans without performing any mechanical calculations. In the video, there are scenes in which he retreats or steps in response to an external force, but this is not a pre-programmed one, but an irregular and spontaneous movement caused by UVC.
(Source code released) ▼ Click here for details ▼ Q&A

(Walking experiment using only postural reflex like human)
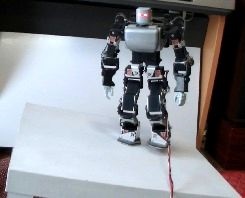
■UVC application
This is an application example of walking start control,
walking on a slope, and stepping through steps using UVC.
(Application source code released)
自転車ロボット撮り直し
自転車ロボットを公開して約十年、最初に撮った動画は画質が非常に悪いため、 左記のお勧め商品で紹介した一眼レフカメラ(D5600)を使用して撮り直しました。 今回、サーボモータの交換や調整等でバランス性能が良くなったので 腰に付いていた転倒時衝撃吸収用のピアノ線やパッドは取外しています。 細かな説明は下記「自転車に乗る」を参照ください。 画像ブレブレですが、自転車と並走した撮影者(妻)のフットワークと体力が 着いて行けずほぼ一発撮り、BGMの長さに合わせ一部カットしています。

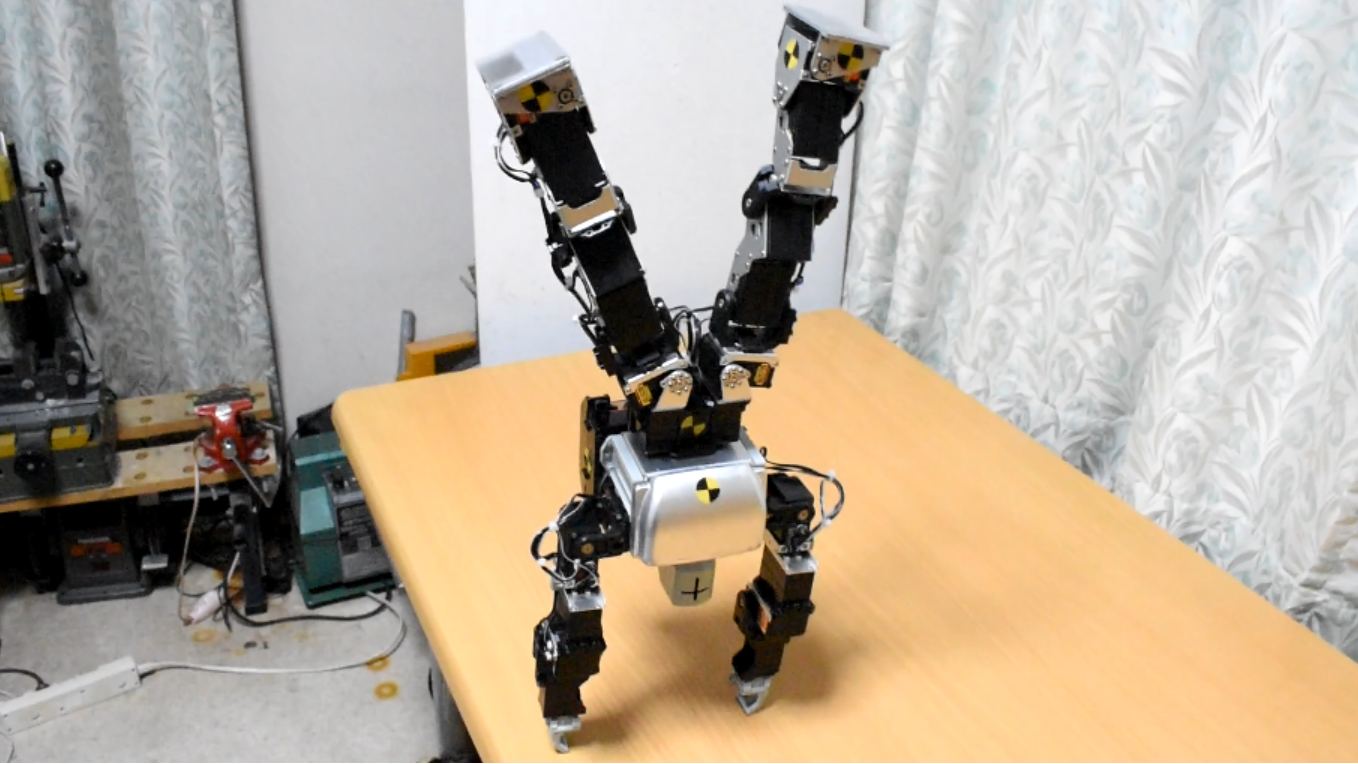
逆立ちに挑戦
倒立動作について、倒立開始から着地までの動きをメインに、公開済み映像も加え、床運動風にアレンジ。 倒立課題は、瞬間々々のバランス制御のみならず目標状態に移行させるための動作を 無数のパターンの中から如何に選択・最適化するかが重要、インテリジェントな処理を必要とする部分です。
ここ約10年の間「技能と知能はある意味等価」の発想に基き、ロボットを利用した様々な技能に 挑戦してきましたが、そろそろロボットを動かすだけの作業は休止し、技能と知能の共通原理 を中心にAI寄りの実験・検討を進めたいと考えています。
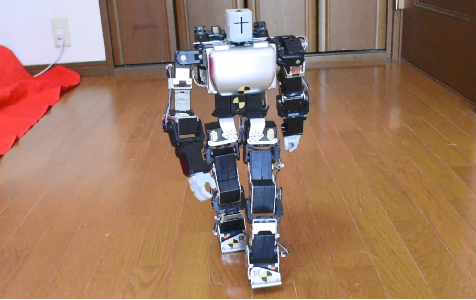
人間みたいな歩き方Ⅱ
腰や爪先&踵を使い人間のように自然な感じで歩きます。前回と比べ爪先&踵効果により足音も小さくなってます。 主な改良点としては、①腰・爪先・踵を利用し着地時の衝撃を抑制、②足を少し内側に踏込み左右の振れを抑制、 ③前方向の速度変化を最適化し前後の振れを抑制、④UVC(上体垂直制御)によってバランス性能を向上。 UVCについては▼UVCの実験 でその効果を検証しています。
バレエの回転技に挑戦
バレエの回転技ピケターンを通してヒューマノイドロボットの複雑な動きやバランス制御などについて検討。 腕の振りを調整して回転速度を一定にするなど細かな制御を組み込んでいます。しかし ヒューマノイドロボットの複雑多様な動きを人間が一つひとつプログラムするのはとても難しいので 人間の仕組み(反射~高次運動機能)を参考に学習によって習得できるよう まだ初歩的な段階ですが色々模索しているところです。
自然な歩行とターンの実験
小型ロボットによる自然な歩行と180度ターンの実験をファッションショー風にアレンジしてみました。 ターンやポージングの部分は作りこみ動作で実現し、人間に近い動きも試しています。 ただ多様な外部条件を想定したとき、そのような方法では限界がると考え現在新たな方式を検討しているところです。 その先行調査を兼ねたものだったのですが少し趣味に走り過ぎたような気も。。
人工知能で制御
人工知能(脳の一部を模倣)技術を利用した踊るロボットを製作しました。 人間の運動野(細分化された技能)や運動連合野の機能(纏まりのある動作を生成)を模倣することで指示(振付)に対し 最も安定な動きを生成、これまで(力学計算方式)とは全く異なる方法で制御しています。 これらを複数のPCで分散処理し、結果を無線LANでロボットに送ります。
ニコニコ動画

▼ 詳しくはこちら
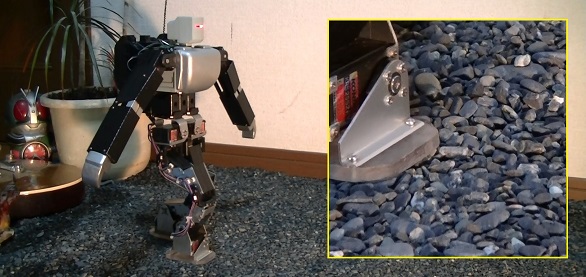
不整地歩行の実験
小型ヒューマノイドロボットに砂利道や砂地などの不整地を歩かせてみました。 脚の制御だけではバランス維持が困難でしたので補助的に手の振りも利用しています。 不整地の場合、つまずかないようもう少し足を高く上げたかったのですがサーボ速度の関係でこれが限界でした。 動画は砂利道を歩く場面から。

|
■ 砂地を歩く 公園の砂地を歩かせてみました。歩行時の姿勢が少し反り返っているように見えますが単に「カメラが傾いているだけ」です^^; |

|
■ 横方向のバランス制御 横方向のバランス制御を確認するため、ブランコにロボットを横向きに乗せてみました。腕を左右に振ってバランスを取ります。 この状態で、もし腕の振りを止めたら確実に転倒します。 |

|
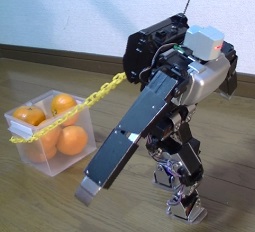
■ 段差を乗り越える 前後の傾きを検知し重心位置を調整することで段差を乗り越えることができます。投げ込まれた本は2002年ROBODEX公式ガイドブック、 小さくMR1の記事も載っております。 |
|
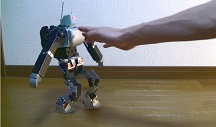
■ 外力安定性 胸を押したり、ボールをぶつけたり、ガムテープを投げつけたり、などしてロボットに外力が加わった際の 安定性を確かめました。これは「ロボット虐待だ!」というコメントもありましたが「そんなつもりはありません。。」 |

|
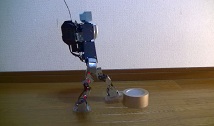
■ 膝曲げ歩行時の障害物 膝曲げ歩行で、脚に物が接触、または引きずった際にどのような動きになるか ガムテープを載せたティッシュボックスを置いて試してみました。 やはり姿勢が低いと股関節サーボへの負荷が減少するため安定してます。 |
|
■ 膝伸ばし歩行時の障害物 同様に膝伸ばし歩行で障害物実験を行ってみました。今度は少し軽めのガムテープでしたが若干歩容が変化しています。 |
■不整地歩行の実験Ⅱ(砂浜を歩く)

【PRIMER-V6改】
上体を左右に振って重心移動すると足が砂に埋まってしまいますので、出来るだけ内側に踏み込み少ない重心移動で歩行できるようにしました。 また足上げを高くし、且つ垂直に振り下ろすことで砂面の起伏や柔らかな砂の上でも足元がブレないようにするなど、砂浜での歩行に適した 歩容に変更しています。
重い荷物を運ぶ

■ 抱えて運ぶ
【PRIMER-V5改】
重い荷物を抱えて運ぶ実験動画です。
荷物の重さに応じ、上体を反らして重心位置を調整します。
また重くなると腰を落として歩行を安定させ、同時に歩行速度
も落とし、サーボ負荷が増大した際に生じる位置制御誤差を補償します。
■ 引いて運ぶ
【PRIMER-V6】
重い荷物を引いて運ぶ実験動画です。
荷物の重さに応じ、上半身を前傾させて張力とのバランスを取ります。
また張力が大きくなるとサーボ負荷も増加し同じ速度では位置制御誤差が大きくなりますので
歩行速度を落として補償します。途中に、
胸を押されて体制を維持するシーンがあります。
今回はボールをぶつける特訓は訳あって控えました。。
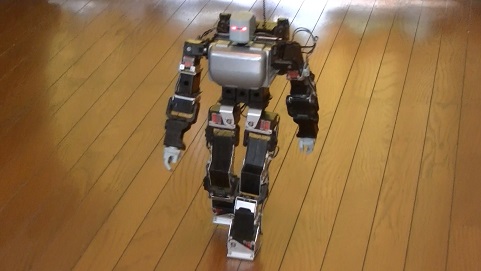
人間みたいな歩き方
市販のホビーロボットを改造し 人間のように自然な歩き方ができるロボットを製作しました。 このように膝を伸ばしたかっこうで「 動歩行 」できる小型ヒューマノイドロボットは世界初?かと思います。 これまでのヒューマノイドロボット(中腰スタイル)との 歩き方の違いを動画で比較してみてください。
▼ 仕様その他
綱渡りに挑戦
小型二足歩行ロボットに綱渡りをさせてみました。 一見、腕の慣性モーメントだけでバランスを取っているように 見えますが実際には(腕の回転角が小さすぎそれだけでは十分な 反動トルクが得られませんので)腕を少し下げその振りによる 反動(ロボット座標上の重心移動で生じるロープ支点の反作用) なども利用しています。

▼ Q&Aなど
バランスを取る
小型二足歩行ロボットのバランス性能を試します。一本足立ちの状態で腕や足におもりを吊るし バランスを取る実験や、斜面での前進・後退・回転動作や、押されても踏ん張る ようすをご覧ください。

■ 斜面を歩く
斜面を歩行します。
水平面内、全方向の傾きを検知、
バランスを維持しながら登る・降りる
回転など、転倒すること無く歩くこと
ができます。
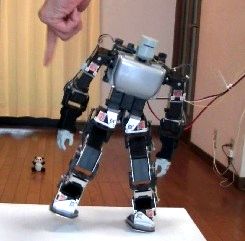
■ 押されると踏ん張る
押されると踏ん張り、転倒を回避します。
水平面内、全方向の傾きや、転倒速度を
検知し、押された方向と反対方向に脚を
広げ、踏ん張ります。
自転車に乗る
小型二足歩行ロボットを自転車に乗せてみました。実際に自身の足でペダルを漕ぎ、 ハンドル操作のみによってバランスを維持します。 これまでの小型自転車(orバイク)では、前輪のジャイロ効果のみを利用したバランス無制御タイプ (ラジコンバイク/自転車)やリアクションホイール(円盤の回転によりバランスを取る)ものが殆どでしたので、 このように人間と同じ方法で自転車を乗りこなすロボットはある意味世界初なのかもしれません。
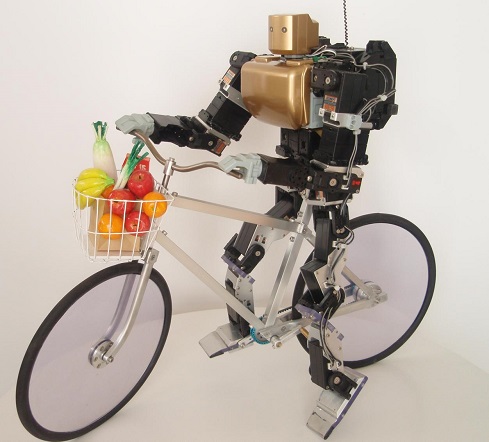
▼ 詳しくはこちら
僅か4個のサーボで動歩行を実現
【MR1】
MR1は僅か4個のサーボでニ足歩行(動歩行)を実現しました。
一般のニ足歩行ロボットのように脚部の駆動に10個程の
サーボを使用するものと比べ極めて簡易な構造です。シンプルにするこでと
歩行制御の基本的な要件や問題点がむしろ明確になる、と考え製作しました。
▼ 詳しくはこちら
-- 作者 --
・Dr.Guero:ドラゴンボール大ファンの妻が付けた愛称 本名:山口雅彦
ロボット製作に感け家事に協力しない悪のイメージ,らしいです。。
・メール:ai2001@outlook.jp

おすすめ商品

 |
|---|
動画撮影用に一眼レフカメラを使用しています。最初は色々難しいですが慣れると楽しく表現の幅が広がります。D5600WZBK ズームレンズ付
 |
|---|

|
|---|
加速度・ジャイロ・磁気の9軸センサ、クォータニオン、オイラー角も取得可能。MPU6050より使い勝手・精度共に良いと思います。

|
|---|
数百KHz程度の矩形波の観測ならこんなもので十分かと。トリガも一般のオシロと同様Sing、Norm、Autoが選べます。購入当時2300円程。
 |
|---|
携帯しやすく下のApple Pencilを使いちょっとしたアイディアメモなどにも利用。大きさも手頃、1台あると便利。

|
|---|
少し高いけど鉛筆のような感じで書けるのでとても良いです。芯を傾けると掠れた線も引けます。
 |
|---|
半田吸い取り機はやはり振動の伝わらないステーション型が一番! サーボの修理でモータを基板から取り外す際はこれがないと殆ど不可能。
 |
|---|
実体顕微鏡
SMT基板の半田付けチェックやサーボの修理など、やはりこれが無いと非常に不便。
 |
|---|
高精細大画面でとても見易くなりました。 ECOモード(消費電力31W)で使用していますが丁度良い明るさです。
(メーカ5年保障)
 |
|---|
防錆潤滑剤スプレー
5-56より少し高いですが防錆&潤滑効果はこちらの方が上とのこと、試に使ってみては如何でしょう。
 |
|---|
UNO R3 互換ボードです。前記ジャイロMPU-6050のDMP調査用に購入。ライブラリが豊富で便利。 USBでコントロール可能。 購入時1,850円
 |
|---|
 |
|---|
ロボットシミュレーション
物理演算(ODE)によるロボットシミュレーションならやはりこの本。 実例付きで解りやすい。
 |
|---|
 |
|---|
21型のLCDハイビジョンモニタです。最近はこんなに安くなったんですねぇ。 拡張モニタとして買おうか迷ってます(掲載時:11,980円)
 |
|---|
土台が重くズッシリと安定。結構明るくて移動しやすいので細かい作業の補助ライトとしても便利に使用してます。 消費電力もたったの3.8Wと省エネ。
 |
|---|
ロボット工学の基礎
ロボット工学の基礎を学ぶならこの本が一番わかり易いと思います。
 |
|---|
アルミ板の曲げ加工に使用しています(2.5mmまで)簡単な構造ですが綺麗に曲げることができ ロボット用の部品製作ならこれで十分かと思います。コンパクトで保管場所を取らないのも嬉しい。
 |
|---|
現在利用しているロボット
PRIMERシリーズでは近藤科学のKHR-3HVというロボットを利用しています。 構造がシンプルで剛性も高くとても使いやすいと思います。
2台購入
 |
|---|
一度使ったら手放せません。懐寸法が広く大きめですがその方がよいと思います。 もう3年以上過酷に使用してますが不思議とバンド(刃)が切れたことが無く、まだ一度も刃を交換してません。
 |
|---|
 |
|---|
現在所有してるオシロはブラウン管式の重くでかいやつなので こうゆう省スペースタイプが欲しいです。 昔の1/50以下の値段とは驚き・・
 |
|---|
人型ロボットの制御理論
少し難しい部分もありますが二足歩行ロボットの主に歩行理論を中心に幅広く解説した良書。 (改訂2版)
 |
|---|
チョットした機械部品を自作するときあると便利。同型のものを使用していますが本当はもっと 大きいのが欲しいです。しかし自宅で使用するならこのサイズが限界かと。
 |
|---|
ミニ丸のこ盤
基板カットなどに便利、但しいい音しますんで夜中の使用はお控えくださいw
 |
|---|
ルーター
もう10年位使ってます。ビットの精度が高く、軸がブレません。回転速度も調節できて手に馴染み使い易いです。
 |
|---|
ベンチグラインダ
治具作りなど、工作好きなら何かと出番が多いです。
 |
|---|
テスターは細かな電圧電流の変化を針の動きで確認できるアナログ式でないとなんとなく不安。
ほぼ同型を15年くらい使用してますが不具合もなくこのタイプ信頼性高いです。
 |
|---|
精度良く計測したい場合はやはりデジタル式が必要。
いろいろ使用したけどテスター類はSANWA製がおすすめ。 よく秋葉とかで見かける激安外国製はアレ・・・
 |
|---|
主に動画保存用に購入。
小型で省エネ、2Tで1万円以下でした。
貴重なデータは2箇所に場所を離して保存してます。
 |
|---|
 |
|---|
外国製の安物ですがチャックや主軸の精度はOK。 太めのドリルやステップドリルを使ってゴリゴリ大きな穴を開けるときなどに使用してます。
 |
|---|
自在バイス
いろいろ使えてとても便利。綱渡りロボットの台座はこれを2個使って固定してます。
話題の商品
 |
|---|
ドラゴンボール
ついでにこれも載せて欲しいと言うので。。 またTV放送始まってるらしいです・・

|
|---|
PRIMER-V2
ときどき訊かれるのですが、こちらは非売品です。。
その他
● 更新情報
*倒れないロボット追加(22' 04/25)
*簡単な原理で歩く追加(21' 04/21)
*自転車ロボット撮り直し追加
*逆立ちに挑戦追加
*人間みたいな歩き方Ⅱ追加
*バレエの回転技に挑戦追加(20' 04/16)
*砂浜での歩行に関する記事追加
*シリアルサーボの制御&注意点
*自転車ロボット説明追加