- MR1は僅か4個のサーボでニ足歩行(動歩行)を実現しました。一般のニ足歩行ロボット
のように脚部歩行機構に10個程度のサーボを使用するものと比べ極めて簡易に二足動歩行を実現しています。
今後は更に機構の簡易化を進め、歩行制御に関する技術的要点(エッセンス)の絞込みを行いたいと考えます。
-
さまざまな歩行環境で常に安定な歩行を可能にしようとした場合、
これまでは、制御アルゴリズムを歩行条件毎に作り込むといったアプローチが一般的でした。
しかし、それにはは限界があるように思われます。
これに対し、歩行学習機能を備えた柔軟性のあるシステム、
具体的には、前記の知見を基に、アプリオリな基本歩行パターンから、
ロボット自身の学習機能によって、自己組織的に外界モデルを内部生成できるようなシステム、
将来はそのようなロボットの開発が必要だと考えます。
- 高さ: 33cm
- 重量: 670g
- サーボ数: 4個
- 消費電力: 5W
- 歩行速度: 0(足踏み状態)〜12cm/sec
- 電源: 外部より供給(5V単一)
- 制御: 外置きのデスクトップパソコンより
- 材料: 骨格部分、サーボマウント部、ロッドなど殆どの部分はアルミ、軸部分は真鍮
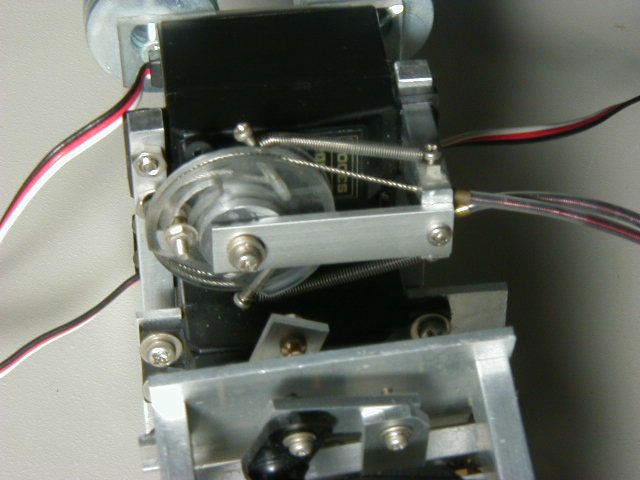
- 動力伝達機構: クランク、ロッド、ワイヤのみ(ギアはサーボ以外の部分では使用せず)
- 重量: 670g
- 足踏み状態から徐々に前進(0.3MbyteMPG)
- 人間と同じ動歩行です。
- 静歩行(1.3Mbyte,MPG)
- 静歩行は重心が常に接地面内にくるような歩き方(抜き足、さし足の感じ)
- 途中でモータを停止していますが倒れません。歩行制御としては比較的簡単です。
- 方向転換(1.3Mbyte,MPG)
- 左に旋回します。現状、暫定的な方式です。
- バランス制御(1Mbyte,MPG)
- 押されると上体をそらせてバランスを維持しようとします。
- 強く押されると押された方向に一歩踏み出します。
- 人間と同じ動歩行です。
- 1.脚の上げ下げ
- 2.脚の前後振り
- 3.上半身の左右振り
- 4.上半身の前後振り
- 2.脚の前後振り
 |
 |
 |
 |
 |
 |
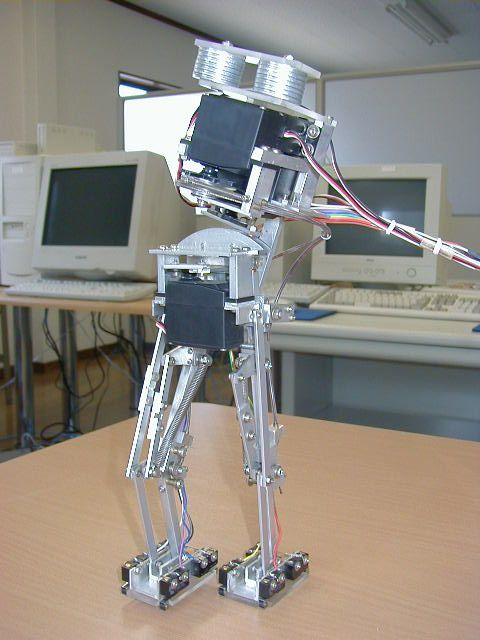
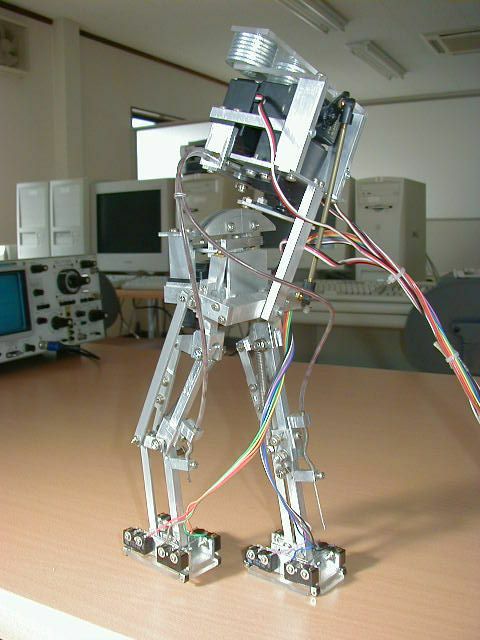
 |
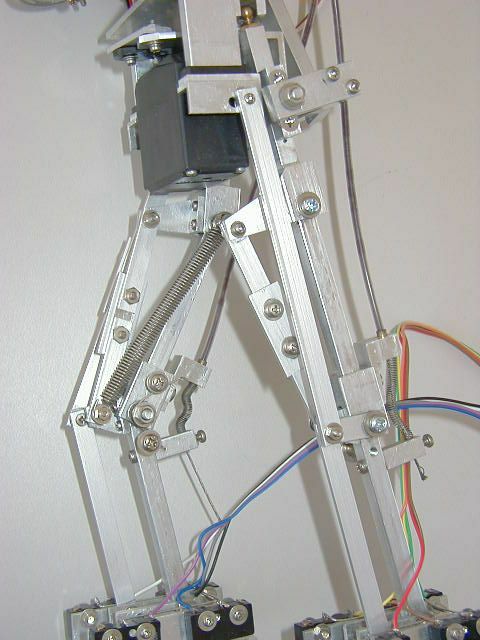
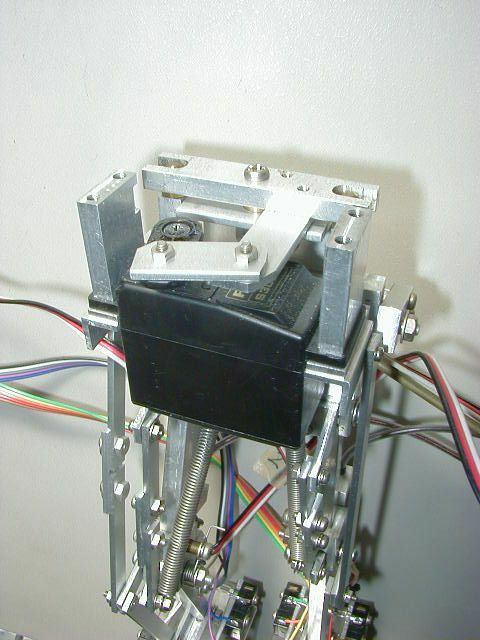
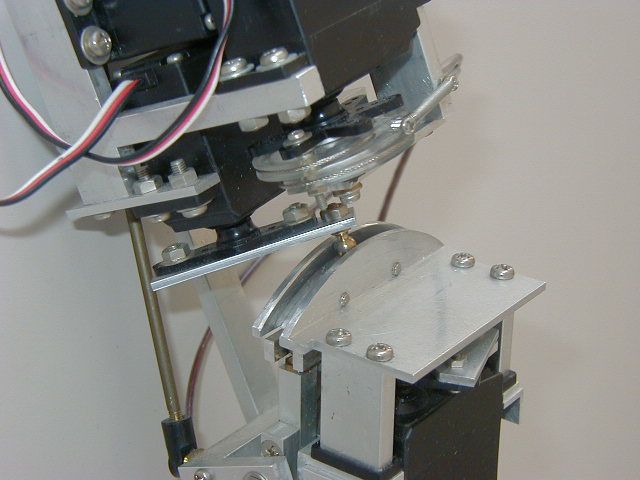
| 前面 | 背面 | 足関節 リンク機構 |
脚前後 駆動機構 |
脚上下 駆動機構 |
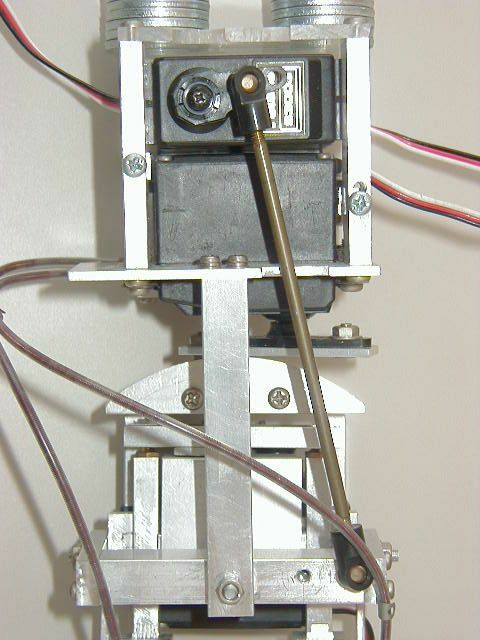
上半身前後 駆動機構 |
上半身左右 駆動機構 |
- ・「機械設計」(2001年3月号)8頁にわたる解説記事が掲載されています。
・「ROBODX2002」(OFIFICIAL GUID BOOK)16頁に紹介記事