It does not perform complicated mechanical calculations and
balances only by postural reflex(*1) like human beings.
üĪPrinciple
The postural reflex used here is to move the hip joint of the leg on the grounded
side and control it so that the upper body is always vertical.
For example, when the upper body leans forward, widen the crotch and return it to the back. Conversely, when the robot leans backwards, the crotch is narrowed, or when walking, the leg swing speed is reduced and the upper body is returned to the front. Keep your upper body vertical in the same way when tilted laterally.
Check how the upper body angle changes when the hip joint on the grounded side is moved by physical simulation. Below
In the zero gravity state, blue is the upper body and white is the leg. One of the white rods is fixed to the ground with a free joint, and the hip joint (the connection between the white rod and the blue rod) is spread to the right. The upper body tilts to the left, and if it is spread in the opposite direction, the upper body tilts to the right. Upper body vertical control (UVC) uses this effect to keep the upper body vertical at all times.
In the case of this robot, the balance control is only UVC, and no mechanical calculation is performed with ZMP(*2) in mind.
In addition, the gyro(*3) for vibration suppression, which is often used in hobby robots, is not applied.
üĪWalking control
For example, when the upper body leans forward, widen the crotch and return it to the back. Conversely, when the robot leans backwards, the crotch is narrowed, or when walking, the leg swing speed is reduced and the upper body is returned to the front. Keep your upper body vertical in the same way when tilted laterally.
Check how the upper body angle changes when the hip joint on the grounded side is moved by physical simulation. Below
In the zero gravity state, blue is the upper body and white is the leg. One of the white rods is fixed to the ground with a free joint, and the hip joint (the connection between the white rod and the blue rod) is spread to the right. The upper body tilts to the left, and if it is spread in the opposite direction, the upper body tilts to the right. Upper body vertical control (UVC) uses this effect to keep the upper body vertical at all times.
In the case of this robot, the balance control is only UVC, and no mechanical calculation is performed with ZMP(*2) in mind.
In addition, the gyro(*3) for vibration suppression, which is often used in hobby robots, is not applied.
UVC cannot be used by itself in walking control,
and actually realizes walking motion by synthesizing three elements
(below) related to walking.
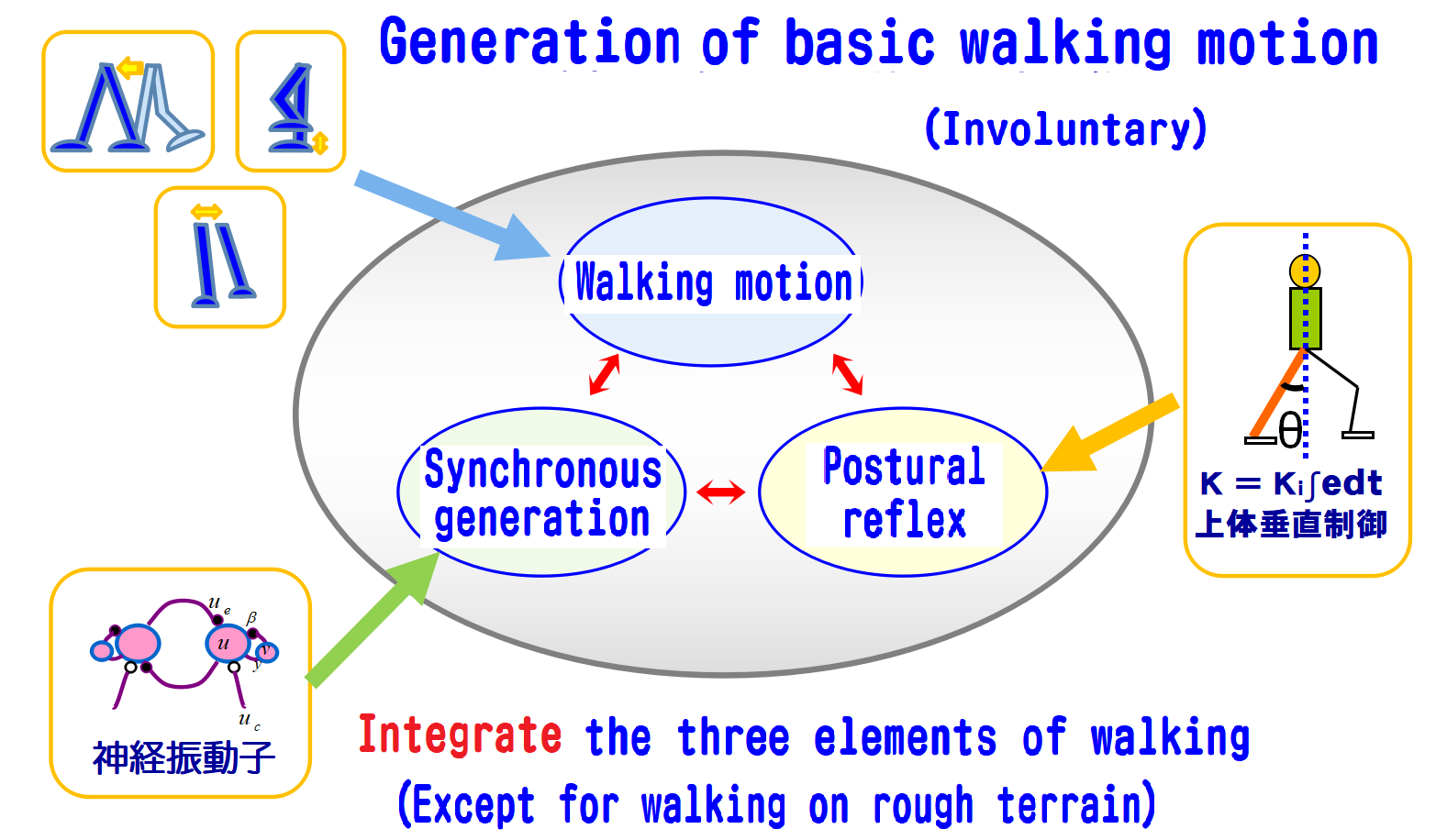
ć@Walking motion
A stable orbit-recreating walking motion (fixed motion *4) that allows walking by itself if no external force is applied.
ćAPostural reflex
UVC (upper body vertical control), the key to balance control.
ćBSynchronous generationüiCPG *5üj
Generation of walking rhythm (period) synchronized with the natural frequency of the robot.
However, in this simulation, the period is fixed (simplified specifications).
Achieves stable walking motion by integrating the above three elements.
üĪSimulation program
ć@Walking motion
A stable orbit-recreating walking motion (fixed motion *4) that allows walking by itself if no external force is applied.
ćAPostural reflex
UVC (upper body vertical control), the key to balance control.
ćBSynchronous generationüiCPG *5üj
Generation of walking rhythm (period) synchronized with the natural frequency of the robot.
However, in this simulation, the period is fixed (simplified specifications).
Achieves stable walking motion by integrating the above three elements.
The entire program can be roughly divided into an ODE main unit and a walking control unit.
The ODE main unit creates a 3D object and moves an object (robot)
according to the instructions of the walking control unit.
On the other hand, the walking control unit is the walking processing main unit that generates walking patterns, and integrates ć@ walking motion, ćA postural reflex, and ćB synchronization to generate the joint drive amount of the robot in real time. (The walking control unit is made up of a short program of about 100 steps)
üiSource code releasedüj Since it has not been finely optimized, there is room for improvement in various ways, and it is free to publish and redistribute it in books. Also,for purposes other than commercial use, UVC can be freely applied to actual machines and made public.
üĪAbout the movement of the robot
On the other hand, the walking control unit is the walking processing main unit that generates walking patterns, and integrates ć@ walking motion, ćA postural reflex, and ćB synchronization to generate the joint drive amount of the robot in real time. (The walking control unit is made up of a short program of about 100 steps)
üiSource code releasedüj Since it has not been finely optimized, there is room for improvement in various ways, and it is free to publish and redistribute it in books. Also,for purposes other than commercial use, UVC can be freely applied to actual machines and made public.
About the movement of the robot.
In the video, there are scenes where the robot touches the bar and is pushed back,
or trips over the sphere and steps on it,
but this does not specifically incorporate such a movement.
It is generated irregularly and spontaneously due to the effect of UVC.
üĪAssignment
Gait control using only UVC is, for example,
like a decapitated chicken walking only by spinal reflex,
and cannot cope with various external conditions.(*6)
In order to make a general-purpose humanoid robot, the function of the human motor cortex (simple movement), the function of the motor association area (a series of movements), the function of the cerebellum (correction of error), and the function of the frontal lobe (construction of an external model and operation) and other central nervous system functions are also required.
For that, not only one-way information processing such as deep learning, but also processing for oneself (self-reflection, image manipulation) is incorporated, and the construction of an external world model (which requires a body that can access the real world). It must evolve into a robot that has the ability to operate (think) it.
------------------------ü@Supplementary explanationü@------------------------In order to make a general-purpose humanoid robot, the function of the human motor cortex (simple movement), the function of the motor association area (a series of movements), the function of the cerebellum (correction of error), and the function of the frontal lobe (construction of an external model and operation) and other central nervous system functions are also required.
For that, not only one-way information processing such as deep learning, but also processing for oneself (self-reflection, image manipulation) is incorporated, and the construction of an external world model (which requires a body that can access the real world). It must evolve into a robot that has the ability to operate (think) it.
*1üF For humans, the righting reflex (the function of keeping the head and trunk in the correct position in space and correcting the relative relationship between the head and trunk), the parachute reflex (the function of pulling back when pushed from the front), Extension reflex, tension labyrinth reflex, tension cervical reflex, and many other reflexes related to vertical upper body retention, which maintain walking balance.
*2üF The leg so that the center of the pressure applied to the sole of the foot (or the resultant force of gravity and acceleration with respect to the center of gravity), which is usually called ZMP, is in the center of the supporting polygon (for example, an equilateral triangle in the case of a tripod) that contacts the ground. Decide what to carry. The equation of motion and various calculations to find it.
*3üF The output (acceleration) of the rate gyro is normally superimposed on the joint drive amount of the roll axis and pitch axis of the ankle, and the robot is suppressed from swinging by making it step on in a tilted direction.
*4üF In the case of humans, when the trunk moves to the left side, the leg on the right side rises reflexively, and the basic walking movement itself is supplemented by reflexes.
*5üF A central pattern generator in the spinal cord that generates the rhythm of walking. Use some feedback signal to adjust the output pattern and cycle so that the walking rhythm does not collapse.
*6üF In many cases, the development of humanoid robots is canceled or shelved. It may not make much sense for a robot (current level) that only walks in good conditions or performs some kind of show.