- 創発的歩行動作や間接駆動に関する自己組織的逆モデルの生成、および人間の神経回路をモデルとした
CPGやバランス制御などをコンピュータ上の仮想ロボットに組み込みその物理シミュレーションを行いました。
これに関してROBO-ONE on PC 5th (シミュレーション部門)にて概要を発表しましたのでそのときの資料を公開します。
- 全ての資料はこちら
-
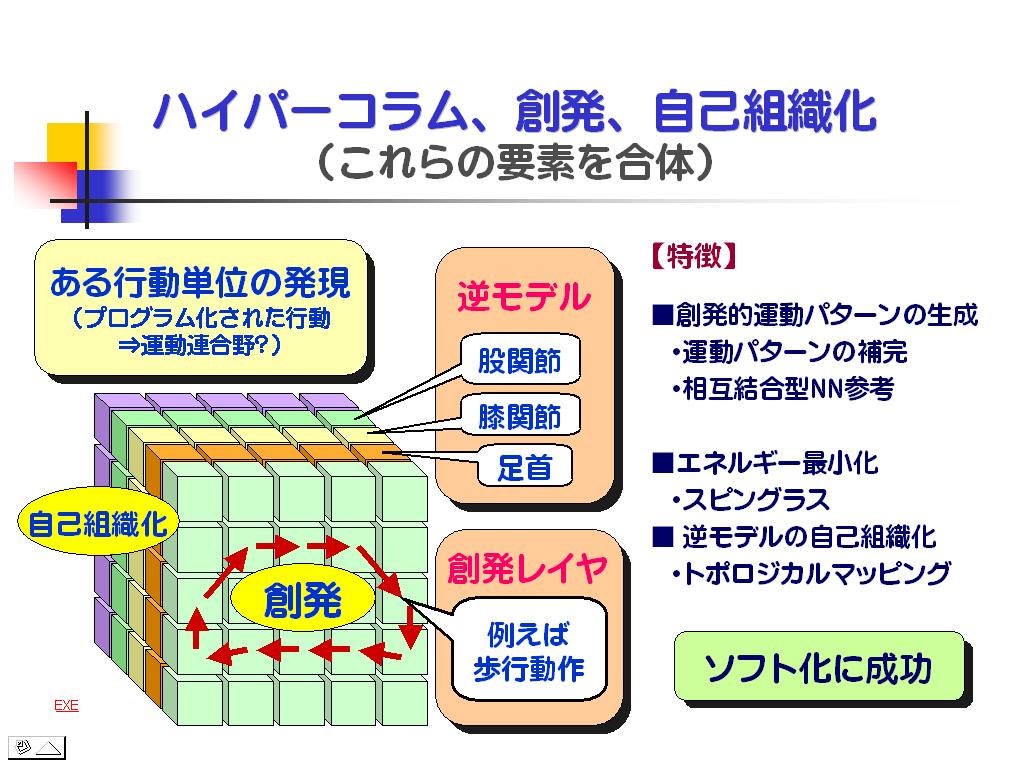
1.【創発ユニット】
粘菌や魚群などに見られる「創発」現象や、一次視覚野に存在するハイパーコラムのトポグラフィカル な構造、自己組織化などをヒントに汎用的なモーション生成ユニット(略称:創発ユニット) を考案。 原理としては、前面に配置された「創発面」で操作点の軌道を生成。 創発面を構成する単位ブロックの一つひとつは例えば歩行動作なら、爪先位置に対応。 この単位ブロックをチェーン状に繋ぎ合わせ、該単位ブロックを択一的に順次励起することで歩行動作 を表現。また単位ブロックは1:Nで結合し重み(結合コンダクタンス)に応じ励起伝播先が変化する 仕組み。相互結合型NN・スピングラスなどの知見を利用し、ある拘束条件の下、最もスムーズで エネルーギー消費の少ないモーションへと徐々に移行。 創発面の裏面は逆モデル層となっており、各層は足の各関節に対応し間接の逆運動学データを格納。 逆モデル層の単位ブロック近傍は互いに近い位相関係にあるという配置上の特性から当初は誤差の大きな 逆運動学データが記録されていても歩行トレーニングを重ねることで徐々に精度の高い逆運動学データに 変化、自己組織的に逆モデルを生成する。
滑らかなモーションを生成(創発)
■創発ユニットで歩行モーションを生成する動画
↓
自己組織的に逆モデルを生成
最初はぎこちない動きですが序所に滑らかな動きに変わります。
約1000歩ほど動かすとかなり自然な動きになります。
2.【歩行リズムの生成】
人間の自動歩行反射と呼ばれる原始反射を参考にアプリオリな歩行反射(遊脚側の接地を検知したら軸足チェンジ、 遊脚の引き上げ、軸足伸張、歩行リズムの調整など)を実装。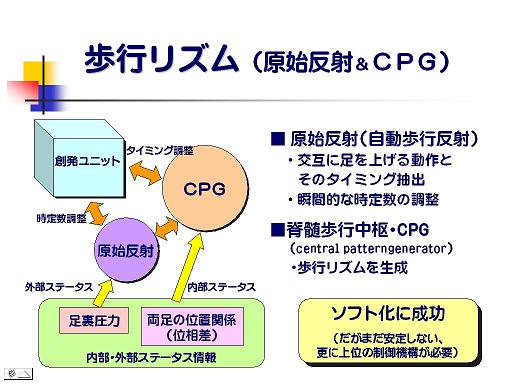
更に、CPG(脊髄歩行中枢)を組み込み、両足の股角位相関係や、原始反射のフェーズ、創発ユニットのフェーズ、 を監視しまたそれらと相互作用することで最適な歩行リズムを生成。
3.【バランス制御】
■障害物に接触しても転倒しない二足歩行ロボットの動画
歩き出すと直に障害物に接触しますが、体勢を取り戻します。その後、左に方向転換。
後半は片足でバランス制御します。
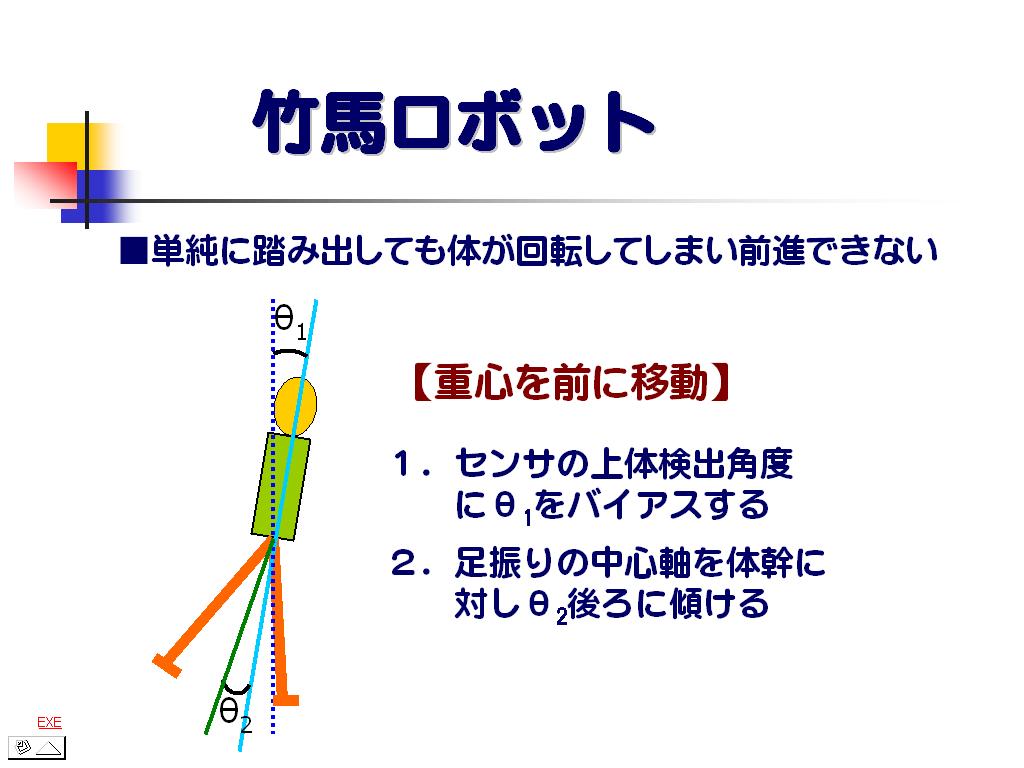
4.【竹馬ロボット】
竹馬では回転方向のグリップが得られないため、そのままでは足を踏み出すと身体が回転してしまい、前進することが できません。その対応として、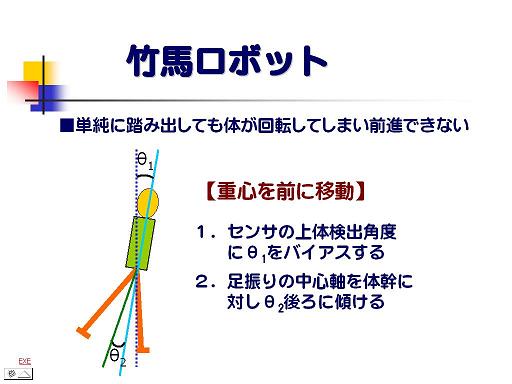
①センサの検出角度をθ1後ろにバイアスし、上体を少し前かがみにする。
②足振りの中心軸をθ2後ろにずらし若干つんのめる体勢にする。
ことで強制的に前進させてみました。
■竹馬型二足歩行ロボットの動画
途中、滑ってバランスを崩しますがなんとか体勢を取り戻します。
後半は片足でバランス制御。
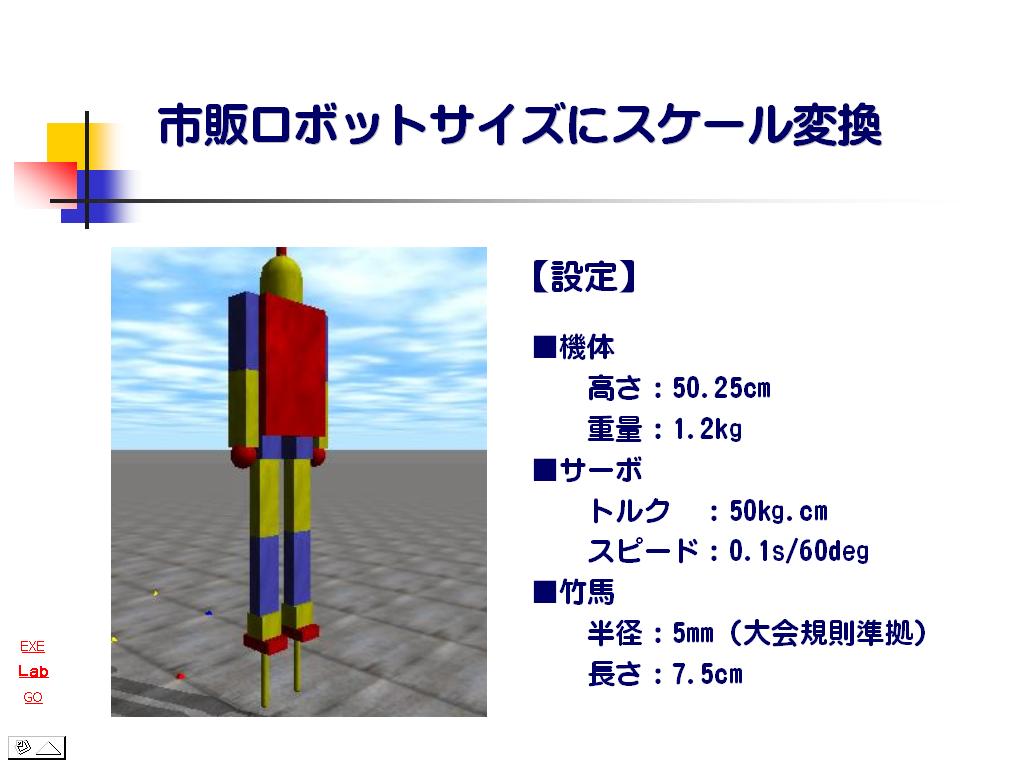
5.【膝のある竹馬ロボット】
竹馬ロボットを市販のロボットサイズにスケール変換、更に膝を通常の折曲がり式に改造しました。
機体設定は、高さ:50.25cm 重量:1.2kg サーボ仕様は、トルク:50kg.cm スピード:0.1s/60deg
竹馬の長さは 7.5cm です。
このロボットについては歩行中の細かなデータを採取します。
■膝関節のある竹馬型二足歩行ロボットの動画
着地後、序所にスピードアップします。 後半は片足でバランス制御。
■竹馬ロボットのデータ解析画面
ロボットの Roll および Pitch 角度、前後左右上下の速度成分、足裏圧力、前後左右の重心位置、CPG値を グラフ表示しました。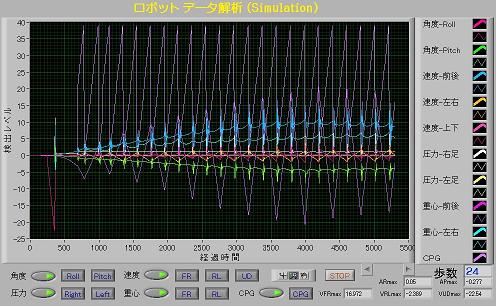
解析画面より、ロボットの歩行ピッチは毎秒約5歩、到達速度は約 90cm/s であることが分かります。
シミュレーション動画では処理速度の関係でゆっくり歩いているように見えますが実際にはかなり高速です。
また、上体が徐々に前傾し足が外側に広がってゆくことも分かります。